
Cycloidal Gearing


High Torque Precision Cycloidal Gears
Key Features
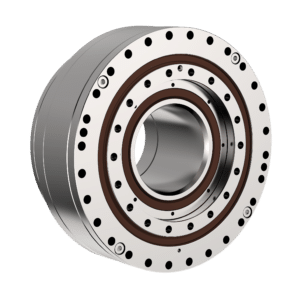
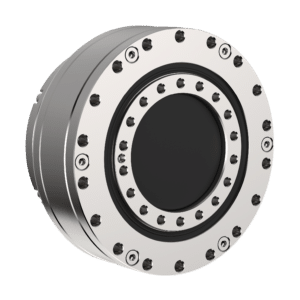
TwinSpin® and DriveSpin® cycloidal gears are designed for high precision, torque density, and weight reduction. The G & GH series provide high tilting stiffness, low friction, and high torque overload capacity with a high precision output bearing. In addition the DS & DSH series provide rotary motion and transfer output torque with high radial-axial load capacity. Cycloidal gearboxes are ideal for robotics and positioning applications.
TwinSpin® Cycloidal Gears
- High Reduction Ratio
- High Kinematic Accuracy
- Low Lost Motion
- High Moment Capacity and Stiffness
- Compact and Lightweight
DriveSpin® Cycloidal Gears
- Dynamic, High Performance Actuator
- Compact Cycloidal Gear Design
- High Torsional and Tilting Stiffness
- Zero Backlash
CYCLOIDAL GEARING SPECIFICATIONS
TwinSpin®
- Sizes: 065 thru 285
- Ratio: 35:1 thru 137:1
- Lost Motion: < 1 arc min
- Rated Output Torque: < 1,700 Nm
- Max. Accel./Decel. Torque: < 4,250 Nm
DriveSpin®
- Sizes: 050 thru 170
Rated Output Torque: < 460 Nm
Max. Acceleration Torque: < 1,150 Nm
TwinSpin® Cycloidal Gears FAQ's
Transmission ratios less than 30:1 can be discussed if requested. Ratios that are not offered as a standard bear higher risk of transmission inaccuracies. Consult technical and delivery conditions with the sales department or our local sales representative.
TwinSpin® runs extremely smoothly. Reference noise measurements of the reduction gear mounted upon a servomotor are available on request.
Reduction gears are preferably intended for duty cycles S3-S8, i.e. output speed in applications is variable in both directions. The S1 duty cycle should be consulted with the manufacturer, but it should not exceed the ambient temperature of 25°C by 40°C.
There is an axial clearance at the input shaft of the reduction gear that allows heat dilatation. Please pay attention to the adjustment of clearance when interfacing the reduction gear with servomotor (see reference Cycloidal Catalog, Chapter 5).
Grease is used in the standard applications. Oil is only used in in special application requests demanding very low viscous friction, in high-speed applications, at special conditions and users´ preferences (e.g. extremely cold environment for radar applications).
The installation position may be vertical or horizontal. Upon request, the manufacturer will provide engineering support, including assembly drawings.
The nominal lifetime L10 means the time in hours when up to 10 % of a batch fails due to material fatigue.
The rated torque is calculated value of the loading constant torque at the nominal constant input speed of the input shaft for the duty cycle when the calculated nominal lifetime is L10 = 6,000 hours and the duty factor ED = 1 (100 %).
Yes. We are able to provide you with necessary technical support. Regarding the flange interfacing, we have a database of typical connecting couplings and interface flanges drawings. We are able to prepare the assembly and detail drawings for customers, if they specify the type and size of motor. Upon request we are also able to manufacture the motor flange and coupling.
There are two options. The first one is no clearance and prestressed in both directions as necessary. The second one is axial and radial clearance of up to 10 microns.
TwinSpin® is a zero backlash reduction gear because there is no reversal clearance between the trochoid teeth of the gear wheels and the cylindrical rollers of the hollow gear wheels in the reduction gear case. This is reached by high-precision manufacturing of components and careful pairing during the assembly.
No. Thanks to very good efficiency there is no self-locking effect. For back-driving torque values see Cycloidal Catalog, Chapter 3.13.
The nominal lifetime is limited by the roller bearing between the eccentric shaft and the gearwheels.
DriveSpin® Cycloidal Gears FAQ's
Feedback Encoders
Yes, we can implement any type of feedback encoder if there is no hardware or mounting limit. In specific cases we can make a custom solution for you and implement your feedback encoder.
We can use single Functional Safety encoder or two independent encoders to provide full safety function for your application.
You can use the feedback encoder with better resolution or use it on the output flange of reduction gear.
Servomotors
We use Permanent Magnet Synchronous Motors (PMSM).
Our standard DC BUS voltage is 24 V, 320 V and 560 V but we can implement servomotor with your requested DC BUS voltage after check by our engineers.
We can provide you with a solution with hall sensors inside the servomotor for application with low resolution requirements.
If our standard DriveSpin® series doesn’t fit your requirements, we can implement different servomotor or design new the one based on your requirements.
Ingress Protection
Ingress Protection of our standard product range is IP64. If your application requires higher IP, we can design
all components of DriveSpin® actuators to reach IP65, IP66, or IP67.
Mechanical Design
If the housing of the standard DriveSpin® cycloidal drive series is not suitable, we can prepare any special design of actuator housing where you can define the shape of housing, mounting elements, or fixation points which are required for your project.
Yes, if you choose TwinSpin® reduction gear and define other electro-mechanical parameters, we can prepare a complete solution for you.
In many cases it is not necessary to develop a completely new product. We may be able to make a small change to the existing mechanical or electrical part of the actuator based on your requirements and develop a modified standard product.
Electrical Connection
Yes, we can implement your special connector for applications where it’s required.
For some application it is possible. We have Hybrid connectors in our product range or we can use any other connector which will fit your technical requirements, for example maximal current for power pins or available quantity of signal pins for used feedback encoder.
Brakes
Yes, we can implement standard 24 V electromagnetic brake for static applications where the brake holds the load in the absence of power.
Yes it is possible, but in this case calculation of the brake parameters is different than in static application brake and it should to be consulted with the manufacturer.
We can implement the brakes with different voltage, hand release, and other special modifications.
Accessories
We have cables between the servo drive and actuator with standard used connectors and length up to 99.9 meters.
PRODUCT DEVELOPMENT
The Cone Drive Product Development Laboratory is a state-of-the-art facility directly adjacent to our Traverse City, Michigan manufacturing location. The lab has the capacity to test a wide range of gear reducer products, for both Cone Drive products as well as those manufactured by other companies. The lab includes capability to run a wide variety of tests including load testing for evaluating reducer performance and operating efficiency.
TEST + CONTROL
PRODUCT MEASUREMENT
- Six product testing stands
- Servo cyclic control
- Simulated inertial loading
- Constant torque/load
- Durability/validation
- Accelerated life test
- Lubricant evaluation
- Static loading & stiffness
- Displacement & motion
- Torque
- Thermal
- Efficiency
- Vibration
- Basic noise
- Transmission accuracy